
De moderna positioneringssystemen – GPS, Glonass, Galileo, Beidou med flera – är globala och kräver därför tredimensionella referenssystem som är globalt anpassade.
I samband med att positionering med hjälp av satelliter, som GPS, slog igenom under 1990-talet har behovet av noggranna tredimensionella referenssystem ökat.
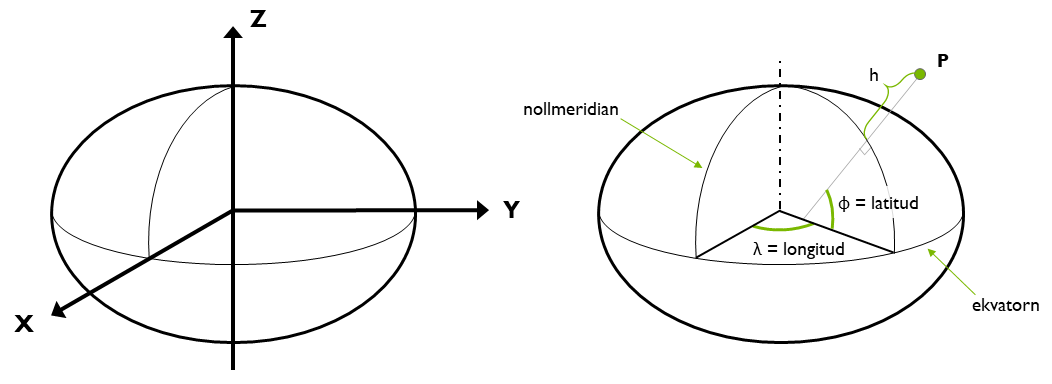
Att ange läget i ett tredimensionellt referenssystem
Läget i ett tredimensionellt referenssystem kan beskrivas på två sätt; antingen som
- tredimensionella kartesiska koordinater (X,Y,Z), eller som
- geodetiska koordinater (latitud, longitud och höjd över ellipsoiden), vilket ofta ger en mer intuitiv beskrivning av en position på jordytan än de kartesiska koordinaterna.
Koordinater kan räknas om mellan de båda koordinatsystemen.
Ytterligare information om ellipsoider och tredimensionella referenssystem (pdf, nytt fönster).
Globala referenssystem
De globala tredimensionella referenssystemen måste kunna hantera förändringar av jordens form på grund av till exempel plattrörelser. Därför har epokhantering blivit viktigt, det vill säga att ange vid vilken tidpunkt punkternas läge är bestämt. Sådana referenssystem, där koordinaterna för en punkt ändras med tiden, brukar kallas dynamiska.
De globala referenssystemen beräknas om med jämna mellanrum, och man brukar säga att dessa beräkningar är olika så kallade realiseringar av referenssystemet. I den engelska terminologin skiljer man på reference system och reference frame. Med reference system avses den teoretiska definitionen av systemet och med reference frame – det vill säga realiseringen – avses fastlagda lägen för punkterna i ett referensnät. På svenska har vi inte den uppdelningen utan talar kort och gott om referenssystem.
| Referens- system |
Plattekto- nisk epok |
Internepok | Producent | Kommentar |
|---|---|---|---|---|
| ITRFyyyy | Dynamisk | Samma som plattepoken | IERS (International Earth Rotation Service) | För beräkning av satellitbanor, noggranna GNSS-beräkningar, vetenskapliga studier. Ett fåtal Swepos-stationer ingår. |
| WGS 84 | Dynamisk | Samma som plattepoken | NGA (National Geospatial-Intelligence Agency, USA) | Mätmetoden är enbart GPS. |
| ETRS89-realiseringar | 1989.0 | Olika | EUREF / olika europeiska kartmyndigheter | |
| SWEREF 99 | 1989.0 | 1999.5 | Lantmäteriet | Nationellt referenssystem. Sammanfaller med andra liknande lösningar på centimeternivå. |
Referenssystem för GNSS
De olika satellitnavigeringssystemen – GNSS, Global Navigation Satellite Systems – använder olika tredimensionella globala referenssystem. Idag är alla sådana referenssystem anslutna till ITRS.
| Satellit- system |
Referens- system |
Ellipsoid | Kommentar |
|---|---|---|---|
| GPS | WGS 84 | WGS 84 | World Geodetic System. Ellipsoiden skiljer 0,1 mm i halva lillaxeln från GRS 80-ellipsoiden. |
| Glonass | PZ‑90.11 | PZ‑90 | Parametry Zemli (Earth Parameters). Ellipsoiden skiljer ca 1 m från GRS 80 i såväl halva storaxeln som halva lillaxeln. |
| Galileo | GTRF | GRS 80 | Galileo Terrestrial Reference Frame |
| Beidou | CGCS 2000 | GRS 80 | China Geodetic Coordinate System |