
I öppna data ingår DGNSS som kan användas då kvalitetskraven inte är de högsta. Tjänsten kräver uppkoppling, vanligtvis via mobilt Internet, och du får din position i realtid. DGNSS ingår i Lantmäteriets öppna data och är tillgänglig för positionering över hela landet.
Använd våra tjänster
Realtidstjänst med lägesosäkerhet på meternivå
DGNSS kan användas fritt av alla som registrerat ett konto och har en GNSS-enhet som kan ta emot standardiserade korrektionsdata i RTCM-format för GNSS via Internet.
Lägesosäkerheten för positionen i referenssystemet SWEREF 99 är på meternivå, men beror på mätmiljön och på GNSS-enhetens prestanda.
Läs mer om Lantmäteriets öppna data.
Observera att DGNSS har ersatt Nätverks-DGNSS som fristående tjänst. Nätverks-DGNSS ingår fortsättningsvis i tjänsten Nätverks-RTK.
Krav och rekommendationer för tjänsten
De grundläggande kraven på din GNSS-enhet är:
- Enheten ska kunna hantera inkommande korrektionsdata för GNSS i standardformatet RTCM 2.3.
- Enheten ska fungera som en Ntrip-klient, eller vara kopplad mot annan enhet som agerar Ntrip-klient (till exempel en mobiltelefon).
Anslutning mot tjänsten
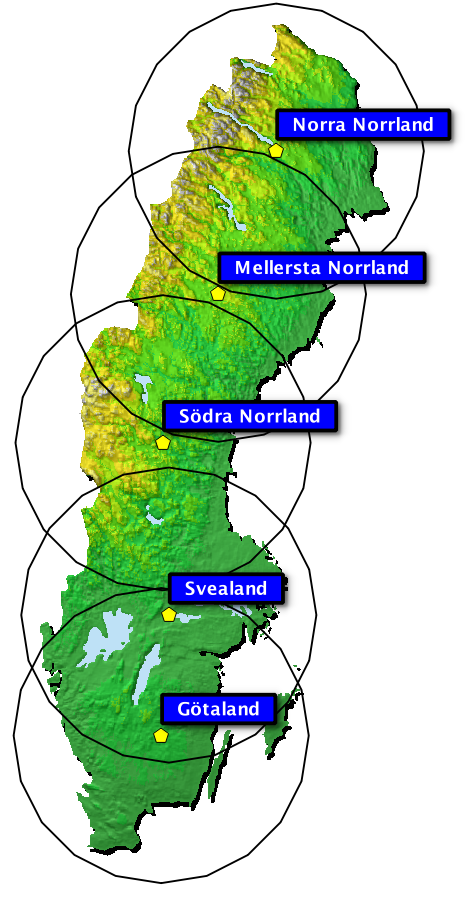
Anslutning sker via modem eller mobiltelefon som är kopplad till (eller integrerad med) GNSS-mottagaren, en så kallad Ntrip-klient. Du väljer en av fem anslutningspunkter, beroende på vilken av punkterna du befinner dig närmast. För att få bästa resultat bör avståndet till närmaste anslutningspunkt inte överstiga 300 kilometer. Anslutningspunkternas namn inom parentes nedan:
- Norra Norrland (norrland_n)
- Mellersta Norrland (norrland_m)
- Södra Norrland (norrland_s)
- Svealand (svealand)
- Götaland (gotaland)
Valet av anslutningspunkt kan automatiseras i vissa Ntrip-klienter, till exempel genom att använda GNSS-enhetens autonoma position.
Har du glömt ditt lösenord? (nytt fönster)
Förväntad positionskvalitet
Med hjälp av korrektionsdata ska din GNSS-enhet kunna positionsbestämmas med en så kallad differentiell kodlösning (vilket motsvarar koden ”2” för GPS Quality Indicator i en GGA-sträng enligt NMEA 0183-standarden (på engelska, nytt fönster)).
För en differentiell kodlösning är förväntad lägesosäkerhet i referenssystemet SWEREF 99 ca 1 meter, men kan variera något beroende på GNSS-enhetens prestanda och avståndet till anslutningspunkten. Måttet på lägesosäkerhet förväntas omfatta ca 95 % av alla positionsbestämningar.
Begreppsförklaringar – GNSS
|
Begrepp
|
Förklaring
|
|---|---|
|
DGNSS
|
Differential GNSS är ett samlingsbegrepp för mätning där man utnyttjar flera GNSS-mottagare för att minska osäkerheten i lägesbestämningen. Idag används DGNSS huvudsakligen för att beskriva de relativa mätmetoder som baseras på kodmätning, vilket bygger på en enklare och mer robust princip jämfört med bärvågsmätning.
|
|
GNSS
|
Global Navigation Satellite Systems är de globala satellitsystem som används för navigering och positionsbestämning, vilket inkluderar det amerikanska GPS, ryska Glonass, europeiska Galileo, kinesiska Beidou, japanska QZSS m.fl.
|
|
Ntrip
|
Networked Transport of RTCM via Internet Protocol är ett standardprotokoll för överföring av GNSS-data över Internet. Den senaste versionen är 2.0.
Exempel på Open Source-utveckling:
|
|
RTCM
|
Radio Technical Commission for Maritime Services är en internationell samarbetsorganisation som upprättar standarder för radiokommunikation. RTCM:s specialkommitté 104 (på engelska, nytt fönster) tillhandahåller de vanligaste fabrikatsoberoende standarderna för så kallade korrektionsdata som används vid GNSS-tillämpningar i realtid. Exempelvis används i den här DGNSS-tjänsten RTCM version 2.3 (på engelska, nytt fönster).
|
|
Swepos
|
Swepos är ett så kallat aktivt referensnät, ett nätverk bestående av hundratals permanenta referensstationer för GNSS med fasta dataförbindelser till Lantmäteriets datacenter. Swepos används bland annat för att definiera och övervaka referenssystemet SWEREF 99. Swepos utgör också infrastrukturen för stora delar av den noggranna GNSS-mätning som görs inom kommunal, privat och statlig kartläggnings- och produktionsverksamhet.
|
|
SWEREF 99
|
Ett nationellt tredimensionellt referenssystem som används för kartläggning och lägesangivelser i Sverige. Lägen i 3D anges i första hand kartesiskt (X,Y,Z) i ett rätvinkligt geocentriskt koordinatsystem, eller i ett geodetiskt koordinatsystem (latitud, longitud, höjd) på referensellipsoiden GRS 80. Om läget ska anges som plana koordinater (2D) så måste projektionsparametrar anges.
|