

Contents of this page may be automatically translated, we take no responsibility for the accuracy of the translation. Feel free to contact our customer support centre if you have any questions.
In absolute positioning, the receiver determines its position directly to the GNSS satellites, and only one GNSS receiver is used. In relative positioning, the receiver determines its position relative to one or more other receivers with a known position.
Absolute positioning with one GNSS receiver
Absolute positioning means that the receiver determines the position directly in relation to the GNSS satellites. The measurement is thus done with only one receiver, which is the standard method for measuring with simpler GNSS receivers and in car navigation systems.
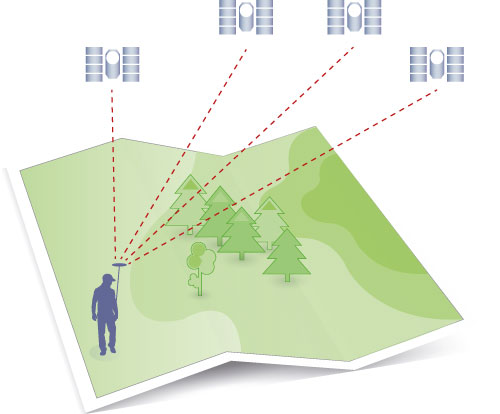
The measurement uncertainty in absolute positioning can be quite high, as it normally does not involve any method to reduce the effect of the sources of error that affect the GNSS signals. Absolute positioning is therefore rarely used in geodetic surveying with GNSS. However, in order to reduce the effect of sources of error in absolute positioning, external information about these can be added, which is used when measuring with Precise Point Positioning (PPP).
Relative positioning with multiple GNSS receivers
In relative positioning, the receiver determines its position relative to one or more other receivers measuring at points with a known position. This requires multiple receivers measuring against the same GNSS satellites at the same time.
By forming differences between the mutual observations, it is possible to reduce or eliminate several sources of error. As a rule of thumb, the closer the receivers are to each other, the better this works, as the GNSS signals that reach each receiver are affected in a similar way by the atmosphere.
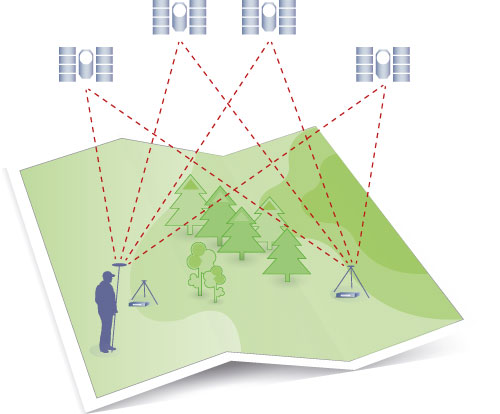
A GNSS receiver that is set up above the known point is called a reference station, while the receiver whose position you are trying to determine using one or more reference stations is called a rover. The reference stations may be temporary or permanent. It has become increasingly common that many Continuously Operating Reference Stations (CORS) form a support system for relative GNSS positioning, for example for network RTK.
For applications requiring a centimetre-level measurement uncertainty, GNSS surveying is almost exclusively done with relative positioning, either in real time or with post-processing of the position. If real-time measurement is to be possible, it requires access to some form of communication channel to send data between reference and rover receivers, such as radio or mobile Internet.
Examples of applied measurement methods based on relative positioning: